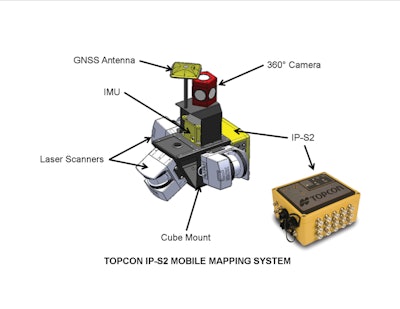
A mobile mapping system (MMS) features several positioning technologies that are commonly used individually for various off-road and on-road applications. As noted by Richard Rybka in his article Where will positioning take us next? he discusses how GPS, intertial measurement units (IMUs) and distance measurement instruments (DMIs) are being integrated into one system to allow rapid data collection. The development of Topcon Positioning System's MMS system was initially driven by Internet map data providers, but the applications and potential benefits for equipment OEMs are becoming more apparent.
As the vehicle travels along a route, the MMS records events and data output from the three positioning devices and information sensors. In IP-S2 systems, these events are timed to GNSS signals at a very precise rate of 15 nanoseconds.
As the data is collected by the MMS, it is stored on a computer hard drive connected to the system. IP-S2 systems use a notebook computer or a specialized computer with multiple cartridge hard drives, depending on which model is used. When the mapping mission has been completed, the data is typically transferred to a processing computer in an office environment.
Geoclean, TPS's processing software, is the key to integrating all the information from positioning devices and sensors. The first processing task decompresses the logged data and converts it to required formats. A second task uses advanced algorithms to process data from GNSS, IMU, and DMI's to create an accurate vehicle trajectory and attitude. To improve accuracy, GNSS data from the mobile system can be post-processed with satellite data logged on a local receiver or from a reference station network.
Once the vehicle trajectory is solved, other Geoclean tasks are initiated to transform the data into a useable format. Individual images from the six-lens camera area stitched together to create a 360° spherical image. Once the spherical image sets are formed, they are aligned to the vehicle trajectory. A point cloud from the laser scanners is generated and also aligned to the vehicle trajectory. Color values for each of the geospatial points in the cloud can be derived from the images.
After processing is completed, TPS's Spatial Factory software can be used to view, analyze, measure, and extract information about features. Standalone LiDAR point clouds can be exported for use in other third-party software applications.
IP-S2 systems and software have created a new class of geospatial data by fusing massive colorized point clouds to 360° images. The user can rotate, pan, and zoom from the center of the spherical image. Geospatial locations of features and measurements are made by snapping to the accurate point cloud. The result is a totally immersive 3D view of objects and surroundings.













![Hd Hyundai Xite Transformation Booth Image[1]](https://img.oemoffhighway.com/files/base/acbm/ooh/image/2023/12/HD_Hyundai_Xite_Transformation_Booth_Image_1_.657a32d4218f2.png?ar=16%3A9&auto=format%2Ccompress&dpr=2&fit=crop&h=135&q=70&rect=113%2C0%2C1600%2C900&w=240)


