ACEINNA announces its OpenIMU300RI, a rugged, sealed-package, open-source, nine-degree-of-freedom (9-DOF) inertial measurement unit (IMU) for autonomous off-road and automotive vehicle applications.
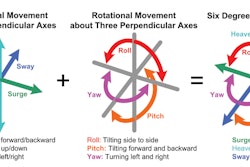
- Allows engineers to easily optimize attitude (Pitch, Roll and Yaw), navigation or other algorithm for vehicle/application and run it in on the IMU
- Minimizes communication on the bus and frees-up processor to do other things, or enables use of less expensive processor
- Applications include keeping cab level, returning arm to specific position, keeping bucket stable while traveling, locking out control for safety applications, supplementing GNSS data to keep on course, etc.
- Sealed rugged module with CAN and RS232 interface
- IP67 Ampseal 16 connector
- Calibrated on precision rate tables and in temperature chambers providing trustworthy 3D linear acceleration, rotation rate, and magnetic field measurement information
- Designers can load ACEINNA’s published open-source algorithms, optimize published ACEINNA algorithms for their own application, or build their own custom algorithms and custom messages
- Rugged design allows mounting directly on construction and agriculture vehicles and attachments which are exposed to the elements during operation or storage
- Completely over molded in plastic and features nickel-plated brass bushings for mounting
- Input power conditioning and protection circuitry is designed and qualified for use on 12 and 24V vehicles
- Supports input voltages between 5 and 32V
Fill out the form below to request more information about ACEINNA OpenIMU300RI Open-Source Inertial Measurement Unit Sensor