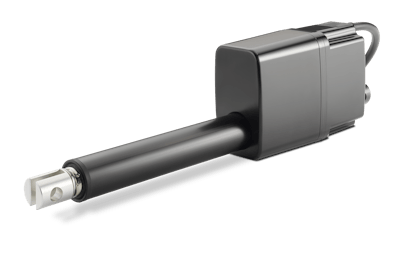
Electromechanical linear actuators are increasingly delivering more power and intelligence in smaller form factors. Packing higher motion control capability into a more compact envelope has given rise to a new generation of high power density actuators. Machine designers for mobile off-highway, material handling, factory automation and other power-hungry applications can now get electrical actuators providing up to 2 kilonewtons (kN)/450 pounds of force (lbf) with advanced onboard electronics – all in a component requiring less space and more cost-efficiency than hydraulic or heavier duty electromechanical actuators that might previously have been deployed for such applications.
Read more: Thomson Electrak HD Linear Actuators
Convergence of the following industry trends is spurring demand for linear actuators with higher power density:
- Industrial Automation designers are looking to actuate heavier loads in more constrained spaces without the environmental and maintenance requirements of hydraulic actuators;
- Systems Engineers seek more precise operating and diagnostic information to optimize performance and address more complex motion control challenges;
- OEMs are working to design more complex machinery in a more condensed package providing them greater flexibility and economy.
First steps toward more space-efficient motion control
Designers of applications requiring upwards of 2 kN/450 lbf in a compact envelope have traditionally used hydraulics, pneumatics, or even a servo-driven electromechanical solution. These systems, however, also required integration of many external components, such as motors, pumps, reservoirs and hoses. The fact that these systems are also costly to maintain due to fluid leakage helped drive demand for alternatives.
Over the past 20 years, industrial electromechanical actuators have expanded force offerings upwards of 16 kN/3,597 lbf in an effort to allow for increased hydraulic conversion. Complementing this power is the integration of onboard electronics, which, in addition to helping provide the motion control necessary to ramp performance to higher levels, also makes space-consuming external equipment such as encoders, relays and switches software-definable so they can be handled within the actuator housing. This eliminates the need for the space required by such devices and their requisite wiring, which gives the machine designer much more flexibility.
 Medium-duty actuators on fertilizer spreader gates help keep weight down and efficiency up.Thomson Industries Inc.
Medium-duty actuators on fertilizer spreader gates help keep weight down and efficiency up.Thomson Industries Inc.
Shrinking the footprint
While the market welcomed more powerful actuators with the capability of converting traditionally hydraulic axes over to electromechanical, many mobile off-highway, material handling and factory automation providers also required a more compact design to meet the needs of their customer base. In general, machines are getting more complex while, at the same time, getting more compact. In order to meet the trends of their industry, machine builders are now designing more complex equipment while finding creative ways to make them more compact. Motion control technology providers responded with advances in gearing, motor sizing, onboard electronics and other innovations that have led to a new breed of electromechanical actuators that have shrunk in overall size compared to their traditional predecessors, while increasing power density.
And with the higher power, these more compact electromechanical actuators retain all of the intelligence built into their larger counterparts – a key differentiator when compared to fluid-based actuators. The electronic control benefits include extensive automation and maintenance enablers such as feedback on position, J1939 CANbus and LINbus communications, low-current switching, end of stroke indication output, multi-actuator synchronization, and option to use with PLCs.
Thomson Industries, for example, has designed an electromechanical actuator for loads up to 2 kN/450 lbf that has all of the same electronics capabilities as a model that can handle 16 kN/3,597 lbf but delivers it in a smaller housing.
 Mirror adjustments on off-highway vehicles can benefit from more power in a compact space.Thomson Industries Inc.
Mirror adjustments on off-highway vehicles can benefit from more power in a compact space.Thomson Industries Inc.
Selecting higher power density actuators
Where actuator selection has traditionally begun with a determination of required load, stroke length and speed, many motion control system designers are finding space constraints to be one of these baseline selection factors. In some cases, the required loads may rise or hold steady at higher levels because the geometries of the machines don’t change that much, forcing designers to trade off between size and required force. Complicating the challenge is the fact that meeting the size constraints may actually require more force.
Mobile off-highway vehicles are a good example of an application category benefiting from a smaller actuator footprint. Smaller vehicles tend to be easier to handle, more energy efficient and can often be more cost efficient, especially if designers do not have to deliver more load capability than is actually required for the task at hand.
Read more: New Thomson Video Illustrates Smart Linear Actuator Benefits for Automation Applications
A harvesting combine, for example, might have some components that require up to 16 kN/3,597 lbf but other moving equipment that does not. Systems such as the sieve, which helps separate the consumable grain from the chaff, or the wind diverter, which directs chaff to the left or right of the combine depending on wind direction, may still require heavier load management, but much less than 3,597 lbf. Such equipment is often located in space-constrained parts of the vehicle, and anything that can be done to optimize this space would be welcome.
Locking mechanisms in material handling systems and ergonomic adjustments on a conveyor are other applications that can benefit from higher power density actuators. Many such applications could use something that can handle up to 2 kN/450 lbf loads but would seldom, if ever, need to approach 16 kN/3,597 lbf capacity.  Diverters and gates in seeders can be synchronized with smarter, higher-force actuators, which are minimal cost and weight additions.Thomson Industries Inc.
Diverters and gates in seeders can be synchronized with smarter, higher-force actuators, which are minimal cost and weight additions.Thomson Industries Inc.
Another automation example might be an actuator used to raise or lower a heavy conveyor to handle cartons of various sizes. Such operations may only be required a few times a day and automating them with a heavy-duty system would likely not be cost effective. A higher power density system, however, would offer a more effective actuator in a smaller footprint, which could bring the benefits of automation to previously manual, potentially dangerous, and – as compared to fluid-powered actuators – grimier operating environment.
Going forward
Generally speaking, the new generation of small form factor, high power density actuators is ideal for applications requiring up to 2 kN/450 lbf of capacity and onboard intelligence. Anything larger than that would likely require a larger electromechanical actuator, synchronization of multiple smart actuators, or — if clean operation and precision are not essential — a fluid-powered solution. If onboard intelligence is not critical, and the required load is less than 0.5 kN/112 lbf a more basic electromechanical actuator might fit within available space constraints.
Even if space is not a primary consideration, making a component smaller without trading off power or intelligence could add value to the end product in terms of flexibility, cost, energy consumption and maintenance. Without a smaller density smart actuator, options are to implement a bigger actuator or limit functionality. With the more compact actuator, there will be fewer design tradeoffs. Designers will have the power they need, along with better access to operating data and the ability to synchronize with other actuators.
As the Industrial Internet of Things and Industry 4.0 initiatives drive the development of more connected and intelligent applications, the demand for more compact actuators is likely to grow. And with that comes an increased ability to integrate previously isolated mechanisms and to scale motion control systems for maximum flexibility and cost advantage.


















